电话:0755-83314220
传真:0755-83314221
E-mail:sales@eastservo.cn
联系地址:深圳市宝安区沙井镇大王山沙井路1号B区1号楼4A,(华升大夏对面)

AGV9060全数字交流伺服驱动器
概述
AGV9060 是本公司采用 DSP 设计生产的矢量控制型全数字交流伺服驱动器。包括三个反馈回路(位置回路、速度回路以及电流回路)。可以工作在位置,速度和转矩模式,适合驱动直流电压 20V-80V,功率在 2KW 以下的交流伺服电机。
特点
位置控制模式下有多种输入方式.
1.脉冲+方向
2.脉冲+反方向
3.双脉冲
4. A/B 相
5.模拟输入(+/-10V)速度控制模式下有多种输入方式
①. 模拟输入(+/-10V)
②.PWM 100%
③. PWM 50%(小于 50%反转,大于 50%正转)
转矩控制模式下有多种输入方式
①. 模拟输入(+/-10V)
②. PWM 100%
③. PWM 50%
支持直线电机,音圈电机。
电流环带宽:(-3dB)2KHz(典型值)
速度环带宽:500Hz(典型值)
位置环带宽:200Hz(典型值)
电机端正交编码器输入接口:差分输入(26LS32)可用 RS232C 接口通过 PC 机或文本显示器下载参数
过流,I2T,过压,欠压,过热,超速,超差保护绿灯表示运行,红灯表示保护或脱机
技术指标
1. 输入直流电压范围 20~80V(典型值)
2. 2000W 连续输出功率
3. 连续输出电流60A (峰值电流)
4. 过载输出电流120A (峰值电流)
5. 保护
过电流动作值峰值 120A±10%
过载 I2t 电流动作值
过热动作值 85℃
过压电压动作值 90V
欠压电压动作值 20V
6. 最大脉冲输入频率 300K
7. RS232 通信,默认通讯速率 9.6Kbps
8. 使用环境
场合:尽量避免粉尘、油雾及腐蚀性气体
工作温度: 0~+50℃
储存温度: -20℃~+80℃
湿度: 40~90%RH(不结露)
冷却方式:自然冷却或强制风冷
9. 外形尺寸 168×109×54
10. 重量 约 850 克-
伺服系统参数调整和设置
软件具有系统配置、PID 参数调节、波形采集、运动控制等功能。详细请看“软件操作手册”
端口说明
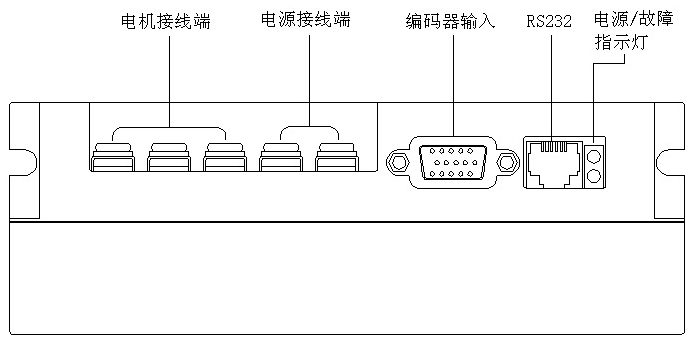
J1: 功率端口说明
|
端子号 |
标识 |
符号 |
名称 |
说明 |
|
1 |
电机相接线端口 |
U |
电机U相 |
|
|
2 |
V |
电机V相 |
||
|
3 |
W |
电机W相 |
||
|
4 |
电源输入接口 |
GND |
输入电源地 |
|
|
5 |
VDC |
输入直流电源正 |
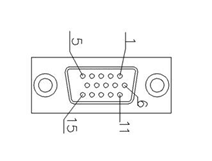
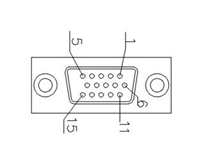
J2: 编码器反馈信号输入端口 (DB15 母头)
|
端子号 |
符号 |
名称 |
说明 |
|
1 |
GND |
输出电源地 |
|
|
2 |
VCC |
输出电源 |
50mA |
|
3 |
PW |
磁极W相输入 |
单端连接 |
|
4 |
PV |
磁极V相输入 |
单端连接 |
|
5 |
PU |
磁极U相输入 |
单端连接 |
|
6 |
PZ+ |
编码器Z相正输入 |
|
|
7 |
PB+ |
编码器B相正输入 |
|
|
8 |
PA+ |
编码器A相正输入 |
|
|
9 |
PE |
屏蔽 |
|
|
10 |
NC |
||
|
11 |
NC |
||
|
12 |
NC |
||
|
13 |
PZ- |
编码器Z相负输入 |
|
|
14 |
PB- |
编码器Z相负输入 |
|
|
15 |
PA- |
编码器Z相负输入 |
本驱动器可以向编码器提供+5V,最大80mA的电源,采用四倍频计数方式,编码器分辨率乘四及时伺服电机每圈所需的脉冲数
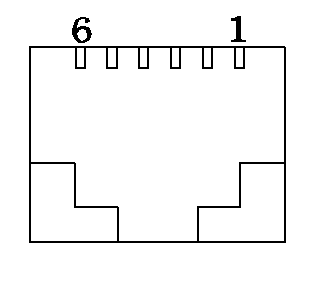
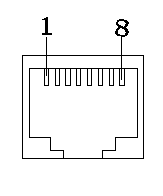
J3: COM口说明
|
脚位 |
功能 |
说明 |
|
1 |
NC |
|
|
2 |
TXD |
|
|
3 |
GND |
信号地 |
|
4 |
RXD |
|
|
5 |
NC |
|
|
6 |
NC |
J4: 控制信号端口说明(DB15母头)
|
脚位 |
符号 |
名称 |
说明 |
|
1 |
PULSE+ |
脉冲信号正输入 |
高有效 |
|
2 |
PULSE- |
脉冲信号负输入 |
低有效 |
|
3 |
DIR+ |
方向信号正输入 |
高有效 |
|
4 |
DIR- |
方向信号负输入 |
低有效 |
|
5 |
XCOM |
输入信号公共端 |
接电源正 |
|
6 |
X1 |
输入端口1:禁能输入 |
低有效 |
|
7 |
X2 |
输入端口2:清除错误信号 |
低有效 |
|
8 |
X3 |
输入端口3:正方向程限位 |
低有效 |
|
9 |
X4 |
输入端口4:负方向程限位 |
低有效 |
|
10 |
Y1 |
输出端口1:刹车输出 |
开漏输出 |
|
11 |
Y2 |
输出端口2:报警信号 |
开漏输出 |
|
12 |
YCOM |
输出公共端 |
接地 |
|
13 |
AN+ |
模拟输入正端 |
+/-10模拟输入 |
|
14 |
AN- |
模拟输入负端 |
+/-10模拟输入 |
|
15 |
GND |
电源及信号地 |
地 |
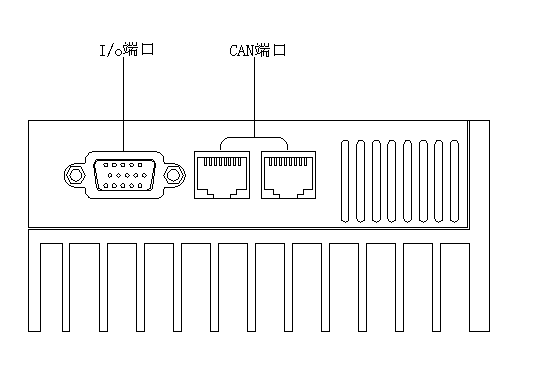
J5与J6: CAN接口说明
|
脚位 |
符号 |
名称 |
说明 |
|
1 |
CAN-H |
CAN-H bus线 |
|
|
2 |
CAN-L |
CAN-L bus线 |
|
|
3.4.5.6.7 |
NC |
NC |
|
|
8 |
CAN-GND |
CAN地 |
伺服系统简单接线例图
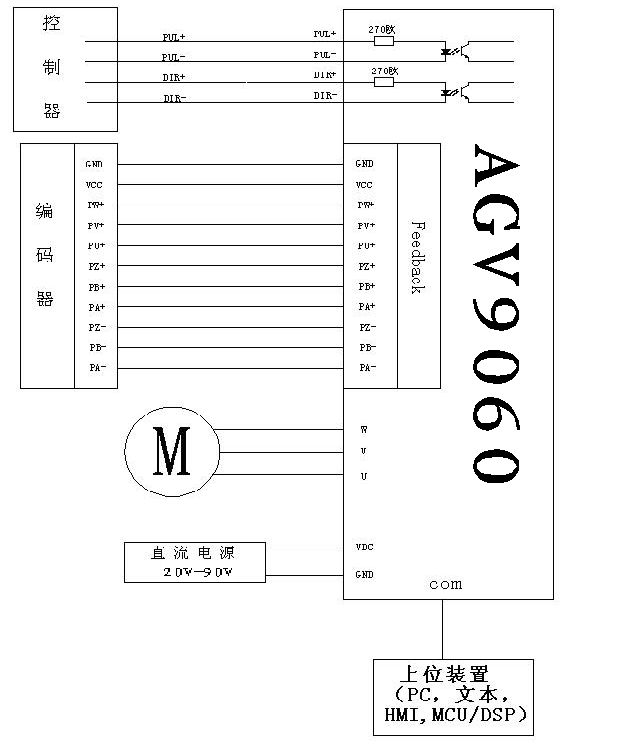
伺服典型接线如下图
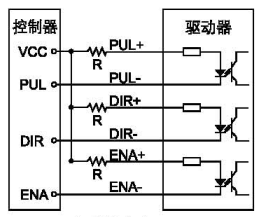
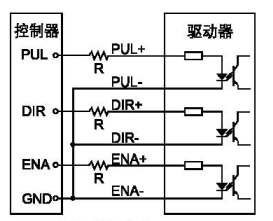
控制信号采用共阳接法时,接线如下图所示:
控制信号采用共阴接法时,接线如下图所示:
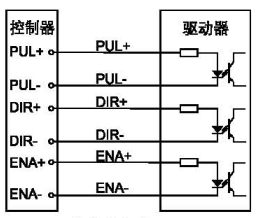
控制信号采用差分接法时,接线如下图所示:
注意:VCC 为 5V 时,R 短路;
VCC 为 12V 时,R 为 1K,大于 0.125W 电阻;
VCC 为 24V 时,R 为 2K,大于 0.125W 电阻;
电阻必须接在控制信号端
安装尺寸图
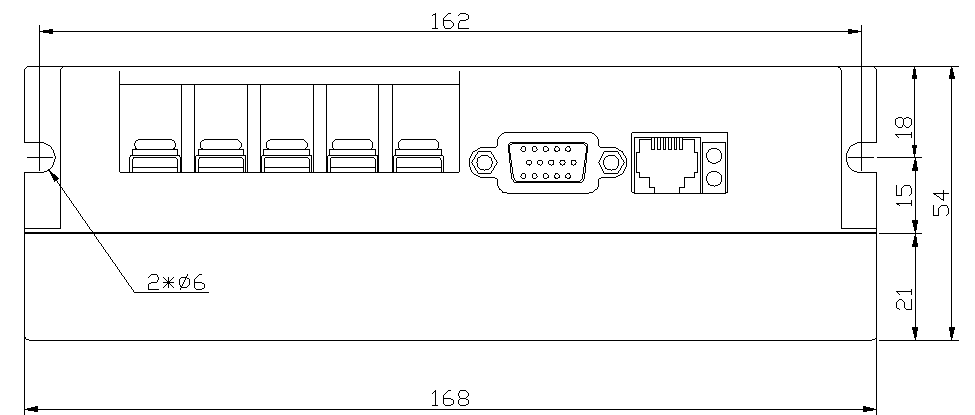
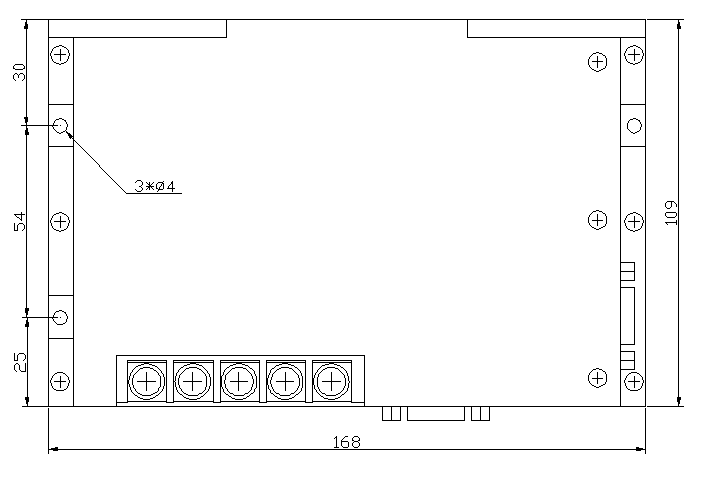
以上为安装尺寸图,单位为mm








